Is easily programmed, with no prior experience needed
Allows employees to focus on high-value activities, not deliveries
Safely and efficiently maneuvers around people and obstacles
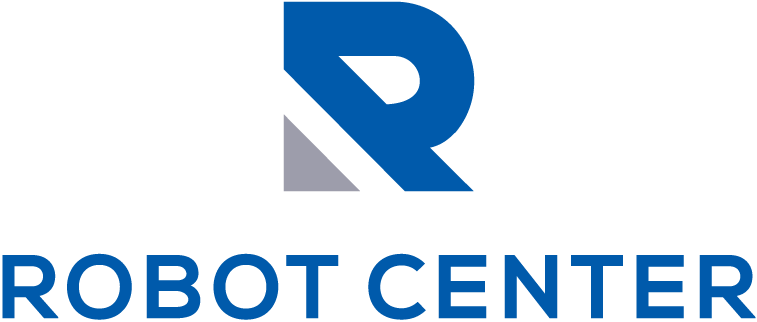
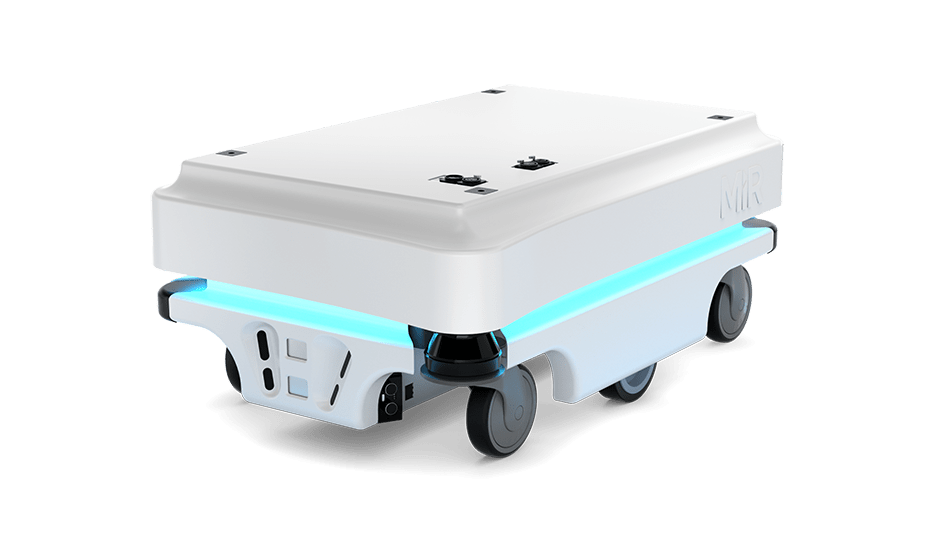
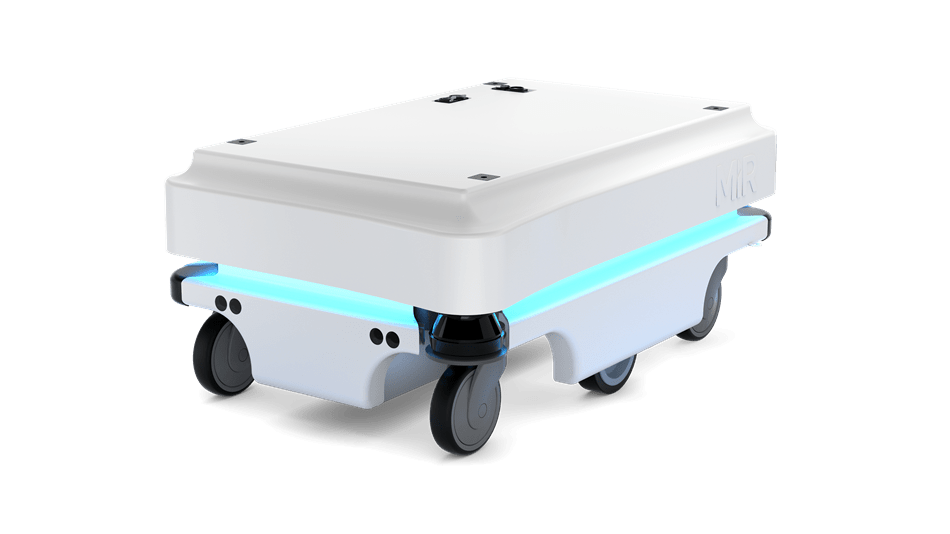
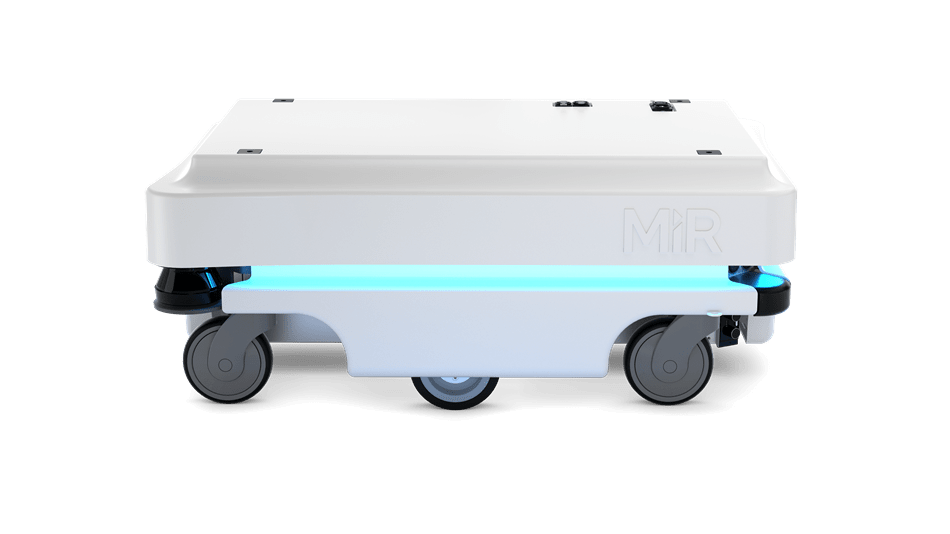
The MiR100 is a safe, cost-effective mobile robot that quickly automates your internal transportation and logistics. The robot optimizes workflows, freeing staff resources so you can increase productivity and reduce costs.